Линейно независимая. Линейная зависимость и независимость, свойства, исследование системы векторов на линейную зависимость, примеры и решения. Линейная зависимость и независимость векторов трехмерного пространства. Пространственный базис и аффинная систе
Линейная зависимость векторов
При решении различных задач, как правило, приходится иметь дело не с одним вектором, а с некоторой совокупностью векторов одной и той же размерности. Такие совокупности называют системой векторов и обозначают
Определение. Линейной комбинацией векторов называется вектор вида
где - любые действительные числа. Также говорят, что вектор линейно выражается через векторы или разлагается по этим векторам.
Например, пусть даны три вектора: , , . Их линейной комбинацией с коэффициентами соответственно 2, 3 и 4 является вектор
Определение. Множество всевозможных линейных комбинаций системы векторов называется линейной оболочкой этой системы.
Определение. Система ненулевых векторов называется линейно зависимой , если существуют такие числа , не равные одновременно нулю, что линейная комбинация данной системы с указанными числами равна нулевому вектору:
Если же последнее равенство для данной системы векторов возможно лишь при , то эта система векторов называется линейно независимой .
Например, система двух векторов , линейно независима; система двух векторов и линейно зависима, так как .
Пусть система векторов (19) линейно зависима. Выберем в сумме (20) слагаемое, в котором коэффициент , и выразим его через остальные слагаемые:
Как видно из этого равенства, один из векторов линейно зависимой системы (19) оказался выраженным через другие векторы этой системы (или разлагается по остальным ее векторам).
Свойства линейно зависимой системы векторов
1. Система, состоящая из одного ненулевого вектора, линейно независима.
2. Система, содержащая нулевой вектор, всегда линейно зависима.
3. Система, содержащая более одного вектора, линейно зависима тогда и только тогда, когда среди ее векторов содержится, по крайней мере, один вектор, который линейно выражается через остальные.
Геометрический смысл линейной зависимости в случае двухмерных векторов на плоскости: когда один вектор выражается через другой, мы имеем , т.е. эти векторы коллинеарны, или что то же самое, находятся на параллельных прямых.
В пространственном случае линейной зависимости трех векторов они параллельны одной плоскости, т.е. компланарны . Достаточно «подправить» соответствующими сомножителями длины этих векторов, чтобы один из них стал суммой двух других или выражался через них.
Теорема. В пространстве любая система, содержащая векторов, линейно зависима при .
Пример. Выяснить, являются ли векторы линейно зависимыми.
Решение . Составим векторное равенство . Записывая в виде вектор-столбцов, получаем
Таким образом, задача свелась к решению системы
Решим систему методом Гаусса:
В результате получим систему уравнений:
которая имеет бесконечное множество решений, среди которых обязательно найдется одно ненулевое, следовательно, векторы линейно зависимые.
В данной статье мы расскажем:
- что такое коллинеарные векторы;
- какие существуют условия коллинеарности векторов;
- какие существуют свойства коллинеарных векторов;
- что такое линейная зависимость коллинеарных векторов.
Коллинеарные векторы - это векторы, которые являются параллелями одной прямой или лежат на одной прямой.
Пример 1
Условия коллинеарности векторов
Два векторы являются коллинеарными, если выполняется любое из следующих условий:
- условие 1 . Векторы a и b коллинеарны при наличии такого числа λ , что a = λ b ;
- условие 2 . Векторы a и b коллинеарны при равном отношении координат:
a = (a 1 ; a 2) , b = (b 1 ; b 2) ⇒ a ∥ b ⇔ a 1 b 1 = a 2 b 2
- условие 3 . Векторы a и b коллинеарны при условии равенства векторного произведения и нулевого вектора:
a ∥ b ⇔ a , b = 0
Замечание 1
Условие 2 неприменимо, если одна из координат вектора равна нулю.
Замечание 2
Условие 3 применимо только к тем векторам, которые заданы в пространстве.
Примеры задач на исследование коллинеарности векторов
Пример 1Исследуем векторы а = (1 ; 3) и b = (2 ; 1) на коллинеарность.
Как решить?
В данном случае необходимо воспользоваться 2-м условием коллинеарности. Для заданных векторов оно выглядит так:
Равенство неверное. Отсюда можно сделать вывод, что векторы a и b неколлинеарны.
Ответ : a | | b
Пример 2
Какое значение m вектора a = (1 ; 2) и b = (- 1 ; m) необходимо для коллинеарности векторов?
Как решить?
Используя второе условие коллинераности, векторы будут коллинеарными, если их координаты будут пропорциональными:
Отсюда видно, что m = - 2 .
Ответ: m = - 2 .
Критерии линейной зависимости и линейной независимости систем векторов
ТеоремаСистема векторов векторного пространства линейно зависима только в том случае, когда один из векторов системы можно выразить через остальные векторы данной системы.
Доказательство
Пусть система e 1 , e 2 , . . . , e n является линейно зависимой. Запишем линейную комбинацию этой системы равную нулевому вектору:
a 1 e 1 + a 2 e 2 + . . . + a n e n = 0
в которой хотя бы один из коэффициентов комбинации не равен нулю.
Пусть a k ≠ 0 k ∈ 1 , 2 , . . . , n .
Делим обе части равенства на ненулевой коэффициент:
a k - 1 (a k - 1 a 1) e 1 + (a k - 1 a k) e k + . . . + (a k - 1 a n) e n = 0
Обозначим:
A k - 1 a m , где m ∈ 1 , 2 , . . . , k - 1 , k + 1 , n
В таком случае:
β 1 e 1 + . . . + β k - 1 e k - 1 + β k + 1 e k + 1 + . . . + β n e n = 0
или e k = (- β 1) e 1 + . . . + (- β k - 1) e k - 1 + (- β k + 1) e k + 1 + . . . + (- β n) e n
Отсюда следует, что один из векторов системы выражается через все остальные векторы системы. Что и требовалось доказать (ч.т.д.).
Достаточность
Пусть один из векторов можно линейно выразить через все остальные векторы системы:
e k = γ 1 e 1 + . . . + γ k - 1 e k - 1 + γ k + 1 e k + 1 + . . . + γ n e n
Переносим вектор e k в правую часть этого равенства:
0 = γ 1 e 1 + . . . + γ k - 1 e k - 1 - e k + γ k + 1 e k + 1 + . . . + γ n e n
Поскольку коэффициент вектора e k равен - 1 ≠ 0 , у нас получается нетривиальное представление нуля системой векторов e 1 , e 2 , . . . , e n , а это, в свою очередь, означает, что данная система векторов линейно зависима. Что и требовалось доказать (ч.т.д.).
Следствие:
- Система векторов является линейно независимой, когда ни один из ее векторов нельзя выразить через все остальные векторы системы.
- Система векторов, которая содержит нулевой вектор или два равных вектора, линейно зависима.
Свойства линейно зависимых векторов
- Для 2-х и 3-х мерных векторов выполняется условие: два линейно зависимых вектора - коллинеарны. Два коллинеарных вектора - линейно зависимы.
- Для 3-х мерных векторов выполняется условие: три линейно зависимые вектора - компланарны. (3 компланарных вектора - линейно зависимы).
- Для n-мерных векторов выполняется условие: n + 1 вектор всегда линейно зависимы.
Примеры решения задач на линейную зависимость или линейную независимость векторов
Пример 3Проверим векторы a = 3 , 4 , 5 , b = - 3 , 0 , 5 , c = 4 , 4 , 4 , d = 3 , 4 , 0 на линейную независимость.
Решение. Векторы являются линейно зависимыми, поскольку размерность векторов меньше количества векторов.
Пример 4
Проверим векторы a = 1 , 1 , 1 , b = 1 , 2 , 0 , c = 0 , - 1 , 1 на линейную независимость.
Решение. Находим значения коэффициентов, при которых линейная комбинация будет равняться нулевому вектору:
x 1 a + x 2 b + x 3 c 1 = 0
Записываем векторное уравнение в виде линейного:
x 1 + x 2 = 0 x 1 + 2 x 2 - x 3 = 0 x 1 + x 3 = 0
Решаем эту систему при помощи метода Гаусса:
1 1 0 | 0 1 2 - 1 | 0 1 0 1 | 0 ~
Из 2-ой строки вычитаем 1-ю, из 3-ей - 1-ю:
~ 1 1 0 | 0 1 - 1 2 - 1 - 1 - 0 | 0 - 0 1 - 1 0 - 1 1 - 0 | 0 - 0 ~ 1 1 0 | 0 0 1 - 1 | 0 0 - 1 1 | 0 ~
Из 1-й строки вычитаем 2-ю, к 3-ей прибавляем 2-ю:
~ 1 - 0 1 - 1 0 - (- 1) | 0 - 0 0 1 - 1 | 0 0 + 0 - 1 + 1 1 + (- 1) | 0 + 0 ~ 0 1 0 | 1 0 1 - 1 | 0 0 0 0 | 0
Из решения следует, что у системы множество решений. Это значит, что существует ненулевая комбинация значения таких чисел x 1 , x 2 , x 3 , при которых линейная комбинация a , b , c равняется нулевому вектору. Следовательно, векторы a , b , c являются линейно зависимыми.
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Введенные нами линейные операции над векторами дают возможность составлять различные выражения для векторных величин и преобразовывать их при помощи установленных для этих операций свойств.
Исходя из заданного набора векторов а 1 , ..., а n , можно составить выражение вида
где а 1 , ..., а n - произвольные действительные числа. Это выражение называют линейной комбинацией векторов а 1 , ..., а n . Числа α i , i = 1, n , представляют собой коэффициенты линейной комбинации . Набор векторов называют еще системой векторов .
В связи с введенным понятием линейной комбинации векторов возникает задача описания множества векторов, которые могут быть записаны в виде линейной комбинации данной системы векторов а 1 , ..., а n . Кроме того, закономерны вопросы об условиях, при которых существует представление вектора в виде линейной комбинации, и о единственности такого представления.
Определение 2.1. Векторы а 1 , ..., а n называют линейно зависимыми , если существует такой набор коэффициентов α 1 , ... , α n , что
α 1 a 1 + ... + α n а n = 0 (2.2)
и при этом хотя бы один из этих коэффициентов ненулевой. Если указанного набора коэффициентов не существует, то векторы называют линейно независимыми .
Если α 1 = ... = α n = 0, то, очевидно, α 1 а 1 + ... + α n а n = 0. Имея это в виду, можем сказать так: векторы а 1 , ..., а n линейно независимы, если из равенства (2.2) вытекает, что все коэффициенты α 1 , ... , α n равны нулю.
Следующая теорема поясняет, почему новое понятие названо термином "зависимость" (или "независимость"), и дает простой критерий линейной зависимости.
Теорема 2.1. Для того чтобы векторы а 1 , ..., а n , n > 1, были линейно зависимы, необходимо и достаточно, чтобы один из них являлся линейной комбинацией остальных.
◄ Необходимость. Предположим, что векторы а 1 , ..., а n линейно зависимы. Согласно определению 2.1 линейной зависимости, в равенстве (2.2) слева есть хотя бы один ненулевой коэффициент, например α 1 . Оставив первое слагаемое в левой части равенства, перенесем остальные в правую часть, меняя, как обычно, у них знаки. Разделив полученное равенство на α 1 , получим
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
т.е. представление вектора a 1 в виде линейной комбинации остальных векторов а 2 , ..., а n .
Достаточность. Пусть, например, первый вектор а 1 можно представить в виде линейной комбинации остальных векторов: а 1 = β 2 а 2 + ... + β n а n . Перенеся все слагаемые из правой части в левую, получим а 1 - β 2 а 2 - ... - β n а n = 0, т.е. линейную комбинацию векторов а 1 , ..., а n с коэффициентами α 1 = 1, α 2 = - β 2 , ..., α n = - β n , равную нулевому вектору. В этой линейной комбинации не все коэффициенты равны нулю. Согласно определению 2.1, векторы а 1 , ..., а n линейно зависимы.
Определение и критерий линейной зависимости сформулированы так, что подразумевают наличие двух или более векторов. Однако можно также говорить о линейной зависимости одного вектора. Чтобы реализовать такую возможность, нужно вместо "векторы линейно зависимы" говорить "система векторов линейно зависима". Нетрудно убедиться, что выражение "система из одного вектора линейно зависима" означает, что этот единственный вектор является нулевым (в линейной комбинации имеется только один коэффициент, и он не должен равняться нулю).
Понятие линейной зависимости имеет простую геометрическую интерпретацию. Эту ин-терпретацию проясняют следующие три утверждения.
Теорема 2.2. Два вектора линейно зависимы тогда и только тогда, когда они коллинеарны.
◄ Если векторы а и b линейно зависимы, то один из них, например а, выражается через другой, т.е. а = λb для некоторого действительного числа λ. Согласно определению 1.7 произведения вектора на число, векторы а и b являются коллинеарными.
Пусть теперь векторы а и b коллинеарны. Если они оба нулевые, то очевидно, что они линейно зависимы, так как любая их линейная комбинация равна нулевому вектору. Пусть один из этих векторов не равен 0, например вектор b. Обозначим через λ отношение длин векторов: λ = |а|/|b|. Коллинеарные векторы могут быть однонаправленными или противоположно направленными . В последнем случае у λ изменим знак. Тогда, проверяя определение 1.7, убеждаемся, что а = λb. Согласно теореме 2.1, векторы а и b линейно зависимы.
Замечание 2.1. В случае двух векторов, учитывая критерий линейной зависимости, доказанную теорему можно переформулировать так: два вектора коллинеарны тогда и только тогда, когда один из них представляется как произведение другого на число. Это является удобным критерием коллинеарности двух векторов.
Теорема 2.3. Три вектора линейно зависимы тогда и только тогда, когда они компланарны .
◄ Если три вектора а, Ь, с линейно зависимы, то, согласно теореме 2.1, один из них, например а, является линейной комбинацией остальных: а = βb + γс. Совместим начала векторов b и с в точке A. Тогда векторы βb, γс будут иметь общее начало в точке A и по правилу параллелограмма их сумма, т.е. вектор а, будет представлять собой вектор с началом A и концом , являющимся вершиной параллелограмма, построенного на векторах-слагаемых. Таким образом, все векторы лежат в одной плоскости, т. е. компланарны.
Пусть векторы а, b, с компланарны. Если один из этих векторов является нулевым, то очевидно, что он будет линейной комбинацией остальных. Достаточно все коэффициенты линейной комбинации взять равными нулю. Поэтому можно считать, что все три вектора не являются нулевыми. Совместим начала этих векторов в общей точке O. Пусть их концами будут соот-ветственно точки A, B, C (рис. 2.1). Через точку C проведем прямые, параллельные прямым, проходящим через пары точек O, A и O, B. Обозначив точки пересечения через A" и B", получим параллелограмм OA"CB", следовательно, OC" = OA" + OB" . Вектор OA" и ненулевой вектор а= OA коллинеарны, а потому первый из них может быть получен умножением второго на действительное число α:OA" = αOA . Аналогично OB" = βOB , β ∈ R. В результате получаем,что OC" = α OA + βOB , т.е. вектор с является линейной комбинацией векторов а и b. Согласно теореме 2.1, векторы a, b, с являются линейно зависимыми.

Теорема 2.4. Любые четыре вектора линейно зависимы.
◄ Доказательство проводим по той же схеме, что и в теореме 2.3. Рассмотрим произвольные четыре вектора a, b, с и d. Если один из четырех векторов является нулевым, либо среди них есть два коллинеарных вектора, либо три из четырех векторов компланарны, то эти четыре вектора линейно зависимы. Например, если векторы а и b коллинеарны, то мы можем составить их линейную комбинацию αa + βb = 0 с ненулевыми коэффициентами, а затем в эту комбинацию добавить оставшиеся два вектора, взяв в качестве коэффициентов нули. Получим равную 0 линейную комбинацию четырех векторов, в которой есть ненулевые коэффициенты.
Таким образом, мы можем считать, что среди выбранных четырех векторов нет нулевых, никакие два не коллинеарны и никакие три не являются компланарными. Выберем в качестве их общего начала точку О. Тогда концами векторов a, b, с, d будут некоторые точки A, B, С, D (рис. 2.2). Через точку D проведем три плоскости, параллельные плоскостям ОВС, OCA, OAB, и пусть A", B", С" - точки пересечения этих плоскостей с прямыми OA, OB, ОС соответственно. Мы получаем параллелепипед OA"C"B"C"B"DA", и векторы a, b, с лежат на его ребрах, выходящих из вершины О. Так как четырехугольник OC"DC" является параллелограммом, то OD = OC" + OC" . В свою очередь, отрезок ОС" является диагональю параллелограмма OA"C"B", так что OC" = OA" + OB" , а OD = OA" + OB" + OC" .
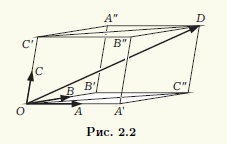
Остается заметить, что пары векторов OA ≠ 0 и OA" , OB ≠ 0 и OB" , OC ≠ 0 и OC" коллинеарны, и, следовательно, можно подобрать коэффициенты α, β, γ так, что OA" = αOA , OB" = βOB и OC" = γOC . Окончательно получаем OD = αOA + βOB + γOC . Следовательно, вектор OD выражается через остальные три вектора, а все четыре вектора, согласно теореме 2.1, линейно зависимы.
Пусть L – линейное пространство над полем Р . Пусть А1, а2, … , аn (*) конечная система векторов из L . Вектор В = a1×А1 + a2×А2 + … + an×Аn (16) называется Линейной комбинацией векторов ( *), или говорят, что вектор В линейно выражается через систему векторов (*).
Определение 14. Система векторов (*) называется Линейно зависимой , тогда и только тогда, когда существует такой ненулевой набор коэффициентов a1, a2, … , an, что a1×А1 + a2×А2 + … + an×Аn = 0. Если же a1×А1 + a2×А2 + … + an×Аn = 0 Û a1 = a2 = … = an = 0, то система (*) называется Линейно независимой.
Свойства линейной зависимости и независимости.
10. Если система векторов содержит нулевой вектор, то она линейно зависима.
Действительно, если в системе (*) вектор А1 = 0, То 1×0 + 0×А2 + … + 0 ×Аn = 0 .
20. Если система векторов содержит два пропорциональных вектора, то она линейно зависима.
Пусть А1 = L ×а2. Тогда 1×А1 –l×А2 + 0×А3 + … + 0×А N = 0.
30. Конечная система векторов (*) при n ³ 2 линейно зависима тогда и только тогда, когда хотя бы один из её векторов является линейной комбинацией остальных векторов этой системы.
Þ Пусть (*) линейно зависима. Тогда найдётся ненулевой набор коэффициентов a1, a2, … , an, при котором a1×А1 + a2×А2 + … + an×Аn = 0 . Не нарушая общности, можно считать, что a1 ¹ 0. Тогда существует и А1 = ×a2×А2 + … + ×an×А N. Итак, вектор А1 является линейной комбинацией остальных векторов.
Ü Пусть один из векторов (*) является линейной комбинацией остальных. Можно считать, что это первый вектор, т. е. А1 = B2А2 + … + bnА N, Отсюда (–1)×А1 + b2А2 + … + bnА N = 0 , т. е. (*) линейно зависима.
Замечание. Используя последнее свойство, можно дать определение линейной зависимости и независимости бесконечной системы векторов.
Определение 15. Система векторов А1, а2, … , аn , … (**) называется Линейно зависимой, Если хотя бы один её вектор является линейной комбинацией некоторого конечного числа остальных векторов. В противном случае система (**) называется Линейно независимой.
40. Конечная система векторов линейно независима тогда и только тогда, когда ни один из её векторов нельзя линейно выразить через остальные её векторы.
50. Если система векторов линейно независима, то любая её подсистема тоже линейно независима.
60. Если некоторая подсистема данной системы векторов линейно зависима, то и вся система тоже линейно зависима.
Пусть даны две системы векторов А1, а2, … , аn , … (16) и В1, в2, … , вs, … (17). Если каждый вектор системы (16) можно представить в виде линейной комбинации конечного числа векторов системы (17), то говорят, что система (17) линейно выражается через систему (16).
Определение 16. Две системы векторов называются Эквивалентными , если каждая из них линейно выражается через другую.
Теорема 9 (основная теорема о линейной зависимости).
Пусть и – две конечные системы векторов из L . Если первая система линейно независима и линейно выражается через вторую, то N £ s.
Доказательство. Предположим, что N > S. По условию теоремы
|
|
Так как система линейно независима, то равенство (18) Û Х1=х2=…=х N= 0. Подставим сюда выражения векторов : …+=0 (19). Отсюда (20). Условия (18), (19) и (20), очевидно, эквивалентны. Но (18) выполняется только при Х1=х2=…=х N= 0. Найдём, когда верно равенство (20). Если все его коэффициенты равны нулю, то оно, очевидно, верно. Приравняв их нулю, получим систему (21). Так как эта система имеет нулевое , то она |

 (21)
(21)совместна. Так как число уравнений больше числа неизвестных, то система имеет бесконечно много решений. Следовательно, у неё есть ненулевое Х10, х20, …, х N0 . При этих значениях равенство (18) будет верно, что противоречит тому, что система векторов линейно независима. Итак, наше предположение не верно. Следовательно, N £ s.
Следствие. Если две эквивалентные системы векторов конечны и линейно независимы, то они содержат одинаковое число векторов.
Определение 17. Система векторов называется Максимальной линейно независимой системой векторов Линейного пространства L , если она линейно независима, но при добавлении к ней любого вектора из L , не входящего в эту систему, она становится уже линейно зависимой.
Теорема 10. Любые две конечные максимальные линейно независимые системы векторов из L Содержат одинаковое число векторов.
Доказательство следует из того, что любые две максимальные линейно независимые системы векторов эквивалентны.
Легко доказать, что любую линейно независимую систему векторов пространства L можно дополнить до максимальной линейно независимой системы векторов этого пространства.
Примеры:
1. Во множестве всех коллинеарных геометрических векторов любая система, состоящая их одного ненулевого вектора, является максимальной линейно независимой.
2. Во множестве всех компланарных геометрических векторов любые два неколлинеарных вектора составляют максимальную линейно независимую систему.
3. Во множестве всех возможных геометрических векторов трёхмерного евклидова пространства любая система трёх некомпланарных векторов является максимальной линейно независимой.
4. Во множестве всех многочленов степени не выше N С действительными (комплексными) коэффициентами система многочленов 1, х, х2, … , хn Является максимальной линейно независимой.
5. Во множестве всех многочленов с действительными (комплексными) коэффициентами примерами максимальной линейно независимой системы являются
а) 1, х, х2, … , хn, … ;
б) 1, (1 – х ), (1 – х )2, … , (1 – х )N, …
6. Множество матриц размерности M ´ N является линейным пространством (проверьте это). Примером максимальной линейно независимой системы в этом пространстве является система матриц Е11 = , Е12 =, … , Е Mn = .
Пусть дана система векторов С1, с2, … , ср (*). Подсистема векторов из (*) называется Максимальной линейно независимой Подсистемой Системы ( *) , если она линейно независима, но при добавлении к ней любого другого вектора этой система она становится линейно зависимой. Если система (*) конечна, то любая её максимальная линейно независимая подсистема содержит одно и то же число векторов. (Доказательство проведите самостоятельно). Число векторов в максимальной линейно независимой подсистеме системы (*) называется Рангом Этой системы. Очевидно, эквивалентные системы векторов имеют одинаковые ранги.
Линейная зависимость и линейная независимость векторов.
Базис векторов. Аффинная система координат
В аудитории находится тележка с шоколадками, и каждому посетителю сегодня достанется сладкая парочка – аналитическая геометрия с линейной алгеброй. В данной статье будут затронуты сразу два раздела высшей математики, и мы посмотрим, как они уживаются в одной обёртке. Сделай паузу, скушай «Твикс»! …блин, ну и чушь спорол. Хотя ладно, забивать не буду, в конце концов, на учёбу должен быть позитивный настрой.
Линейная зависимость векторов
, линейная независимость векторов
, базис векторов
и др. термины имеют не только геометрическую интерпретацию, но, прежде всего, алгебраический смысл . Само понятие «вектор» с точки зрения линейной алгебры – это далеко не всегда тот «обычный» вектор, который мы можем изобразить на плоскости или в пространстве. За доказательством далеко ходить не нужно, попробуйте нарисовать вектор пятимерного пространства ![]() . Или вектор погоды, за которым я только что сходил на Гисметео: – температура и атмосферное давление соответственно. Пример, конечно, некорректен с точки зрения свойств векторного пространства, но, тем не менее, никто не запрещает формализовать данные параметры вектором. Дыхание осени….
. Или вектор погоды, за которым я только что сходил на Гисметео: – температура и атмосферное давление соответственно. Пример, конечно, некорректен с точки зрения свойств векторного пространства, но, тем не менее, никто не запрещает формализовать данные параметры вектором. Дыхание осени….
Нет, я не собираюсь грузить вас теорией, линейными векторными пространствами, задача состоит в том, чтобы понять определения и теоремы. Новые термины (линейная зависимость, независимость, линейная комбинация, базис и т.д.) приложимы ко всем векторам с алгебраической точки зрения , но примеры будут даны геометрические. Таким образом, всё просто, доступно и наглядно. Помимо задач аналитической геометрии мы рассмотрим и некоторые типовые задания алгебры . Для освоения материала желательно ознакомиться с уроками Векторы для чайников и Как вычислить определитель?
Линейная зависимость и независимость векторов плоскости.
Базис плоскости и аффинная система координат
Рассмотрим плоскость вашего компьютерного стола (просто стола, тумбочки, пола, потолка, кому что нравится). Задача будет состоять в следующих действиях:
1) Выбрать базис плоскости . Грубо говоря, у столешницы есть длина и ширина, поэтому интуитивно понятно, что для построения базиса потребуется два вектора. Одного вектора явно мало, три вектора – лишка.
2) На основе выбранного базиса задать систему координат (координатную сетку), чтобы присвоить координаты всем находящимся на столе предметам.
Не удивляйтесь, сначала объяснения будут на пальцах. Причём, на ваших. Пожалуйста, поместите указательный палец левой руки
на край столешницы так, чтобы он смотрел в монитор. Это будет вектор . Теперь поместите мизинец правой руки
на край стола точно так же – чтобы он был направлен на экран монитора. Это будет вектор . Улыбнитесь, вы замечательно выглядите! Что можно сказать о векторах ? Данные векторы коллинеарны
, а значит, линейно
выражаются друг через друга:
, ну, или наоборот: , где – некоторое число, отличное от нуля.
Картинку сего действа можно посмотреть на уроке Векторы для чайников , где я объяснял правило умножения вектора на число.
Будут ли ваши пальчики задавать базис на плоскости компьютерного стола? Очевидно, что нет. Коллинеарные векторы путешествуют туда-сюда по одному направлению, а у плоскости есть длина и ширина.
Такие векторы называют линейно зависимыми .
Справка: Слова «линейный», «линейно» обозначают тот факт, что в математических уравнениях, выражениях нет квадратов, кубов, других степеней, логарифмов, синусов и т.д. Есть только линейные (1-й степени) выражения и зависимости.
Два вектора плоскости линейно зависимы тогда и только тогда , когда они коллинеарны .
Скрестите пальцы на столе, чтобы между ними был любой угол, кроме 0 или 180 градусов. Два вектора плоскости линейно не зависимы в том и только том случае, если они не коллинеарны . Итак, базис получен. Не нужно смущаться, что базис получился «косым» с неперпендикулярными векторами различной длины. Очень скоро мы увидим, что для его построения пригоден не только угол в 90 градусов, и не только единичные, равные по длине векторы
Любой
вектор плоскости единственным образом
раскладывается по базису :![]() , где – действительные числа . Числа называют координатами вектора
в данном базисе.
, где – действительные числа . Числа называют координатами вектора
в данном базисе.
Также говорят, что вектор представлен в виде линейной комбинации базисных векторов . То есть, выражение называют разложением вектора по базису или линейной комбинацией базисных векторов.
Например, можно сказать, что вектор разложен по ортонормированному базису плоскости , а можно сказать, что он представлен в виде линейной комбинации векторов .
Сформулируем определение базиса формально: Базисом плоскости называется пара линейно независимых (неколлинеарных) векторов , , при этом любой вектор плоскости является линейной комбинацией базисных векторов.
Существенным моментом определения является тот факт, что векторы взяты в определённом порядке
. Базисы ![]() – это два совершенно разных базиса! Как говорится, мизинец левой руки не переставишь на место мизинца правой руки.
– это два совершенно разных базиса! Как говорится, мизинец левой руки не переставишь на место мизинца правой руки.
С базисом разобрались, но его недостаточно, чтобы задать координатную сетку и присвоить координаты каждому предмету вашего компьютерного стола. Почему недостаточно? Векторы являются свободными и блуждают по всей плоскости. Так как же присвоить координаты тем маленьким грязным точкам стола, которые остались после бурных выходных? Необходим отправной ориентир. И таким ориентиром является знакомая всем точка – начало координат. Разбираемся с системой координат:
Начну со «школьной» системы. Уже на вступительном уроке Векторы для чайников я выделял некоторые различия между прямоугольной системой координат и ортонормированным базисом . Вот стандартная картина:

Когда говорят о прямоугольной системе координат , то чаще всего имеют в виду начало координат, координатные оси и масштаб по осям. Попробуйте набрать в поисковике «прямоугольная система координат», и вы увидите, что многие источники вам будут рассказывать про знакомые с 5-6-го класса координатные оси и о том, как откладывать точки на плоскости.
С другой стороны, создается впечатление, что прямоугольную систему координат вполне можно определить через ортонормированный базис . И это почти так. Формулировка звучит следующим образом:
началом координат , и ортонормированный базис задают декартову прямоугольную систему координат плоскости . То есть, прямоугольная система координат однозначно определяется единственной точкой и двумя единичными ортогональными векторами . Именно поэтому, вы видите чертёж, который я привёл выше – в геометрических задачах часто (но далеко не всегда) рисуют и векторы, и координатные оси.
Думаю, всем понятно, что с помощью точки (начала координат) и ортонормированного базиса ЛЮБОЙ ТОЧКЕ плоскости и ЛЮБОМУ ВЕКТОРУ плоскости можно присвоить координаты. Образно говоря, «на плоскости всё можно пронумеровать».
Обязаны ли координатные векторы быть единичными? Нет, они могут иметь произвольную ненулевую длину. Рассмотрим точку и два ортогональных вектора произвольной ненулевой длины:

Такой базис называется ортогональным
. Начало координат с векторами задают координатную сетку, и любая точка плоскости, любой вектор имеют свои координаты в данном базисе. Например, или . Очевидное неудобство состоит в том, что координатные векторы в общем случае
имеют различные длины, отличные от единицы. Если длины равняются единице, то получается привычный ортонормированный базис.
! Примечание : в ортогональном базисе, а также ниже в аффинных базисах плоскости и пространства единицы по осям считаются УСЛОВНЫМИ . Например, в одной единице по оси абсцисс содержится 4 см, в одной единице по оси ординат 2 см. Данной информации достаточно, чтобы при необходимости перевести «нестандартные» координаты в «наши обычные сантиметры».
И второй вопрос, на который уже на самом деле дан ответ – обязательно ли угол между базисными векторами должен равняться 90 градусам? Нет! Как гласит определение, базисные векторы должны быть лишь неколлинеарными . Соответственно угол может быть любым, кроме 0 и 180 градусов.
Точка плоскости, которая называется началом координат , и неколлинеарные векторы , , задают аффинную систему координат плоскости :

Иногда такую систему координат называют косоугольной
системой. В качестве примеров на чертеже изображены точки и векторы:
Как понимаете, аффинная система координат ещё менее удобна, в ней не работают формулы длин векторов и отрезков, которые мы рассматривали во второй части урока Векторы для чайников , многие вкусные формулы, связанные со скалярным произведением векторов . Зато справедливы правила сложения векторов и умножения вектора на число, формулы деления отрезка в данном отношении , а также ещё некоторые типы задач, которые мы скоро рассмотрим.
А вывод таков, что наиболее удобным частным случаем аффинной системы координат является декартова прямоугольная система. Поэтому её, родную, чаще всего и приходится лицезреть. …Впрочем, всё в этой жизни относительно – существует немало ситуаций, в которых уместна именно косоугольная (или какая-набудь другая, например, полярная ) система координат. Да и гуманоидам такие системы могут прийтись по вкусу =)
Переходим к практической части. Все задачи данного урока справедливы как для прямоугольной системы координат, так и для общего аффинного случая. Сложного здесь ничего нет, весь материал доступен даже школьнику.
Как определить коллинеарность векторов плоскости?
Типовая вещь. Для того чтобы два вектора плоскости ![]() были коллинеарны, необходимо и достаточно, чтобы их соответствующие координаты были пропорциональны
.По существу, это покоординатная детализация очевидного соотношения .
были коллинеарны, необходимо и достаточно, чтобы их соответствующие координаты были пропорциональны
.По существу, это покоординатная детализация очевидного соотношения .
Пример 1
а) Проверить, коллинеарны ли векторы ![]() .
.
б) Образуют ли базис векторы ![]() ?
?
Решение:
а) Выясним, существует ли для векторов ![]() коэффициент пропорциональности , такой, чтобы выполнялись равенства :
коэффициент пропорциональности , такой, чтобы выполнялись равенства :![]()
Обязательно расскажу о «пижонской» разновидности применения данного правила, которая вполне прокатывает на практике. Идея состоит в том, чтобы сразу составить пропорцию и посмотреть, будет ли она верной:
Составим пропорцию из отношений соответствующих координат векторов:
Сокращаем:
, таким образом, соответствующие координаты пропорциональны, следовательно,
Отношение можно было составить и наоборот, это равноценный вариант:
Для самопроверки можно использовать то обстоятельство, что коллинеарные векторы линейно выражаются друг через друга. В данном случае имеют место равенства ![]() . Их справедливость легко проверяется через элементарные действия с векторами:
. Их справедливость легко проверяется через элементарные действия с векторами:
б) Два вектора плоскости образуют базис, если они не коллинеарны (линейно независимы). Исследуем на коллинеарность векторы ![]() . Составим систему:
. Составим систему:
Из первого уравнения следует, что , из второго уравнения следует, что , значит, система несовместна (решений нет). Таким образом, соответствующие координаты векторов не пропорциональны.
Вывод : векторы линейно независимы и образуют базис.
Упрощённая версия решения выглядит так:
Составим пропорцию из соответствующих координат векторов ![]() :
:
, значит, данные векторы линейно независимы и образуют базис.
Обычно такой вариант не бракуют рецензенты, но возникает проблема в тех случаях, когда некоторые координаты равны нулю. Вот так: ![]() . Или так:
. Или так: ![]() . Или так:
. Или так: ![]() . Как тут действовать через пропорцию? (действительно, на ноль же делить нельзя). Именно по этой причине я и назвал упрощенное решение «пижонским».
. Как тут действовать через пропорцию? (действительно, на ноль же делить нельзя). Именно по этой причине я и назвал упрощенное решение «пижонским».
Ответ: а) , б) образуют.
Небольшой творческий пример для самостоятельного решения:
Пример 2
При каком значении параметра векторы ![]() будут коллинеарны?
будут коллинеарны?
В образце решения параметр найден через пропорцию .
Существует изящный алгебраический способ проверки векторов на коллинеарность., систематизируем наши знания и пятым пунктом как раз добавим его:
Для двух векторов плоскости эквивалентны следующие утверждения
:
2) векторы образуют базис;
3) векторы не коллинеарны;
+ 5) определитель, составленный из координат данных векторов, отличен от нуля
.
Соответственно, эквивалентны следующие противоположные утверждения
:
1) векторы линейно зависимы;
2) векторы не образуют базиса;
3) векторы коллинеарны;
4) векторы можно линейно выразить друг через друга;
+ 5) определитель, составленный из координат данных векторов, равен нулю
.
Я очень и очень надеюсь, что на данный момент вам уже понятны все встретившиеся термины и утверждения.
Рассмотрим более подробно новый, пятый пункт: два вектора плоскости ![]() коллинеарны тогда и только тогда, когда определитель, составленный из координат данных векторов, равен нулю
:. Для применения данного признака, естественно, нужно уметь находить определители
.
коллинеарны тогда и только тогда, когда определитель, составленный из координат данных векторов, равен нулю
:. Для применения данного признака, естественно, нужно уметь находить определители
.
Решим Пример 1 вторым способом:
а) Вычислим определитель, составленный из координат векторов ![]() :
:![]() , значит, данные векторы коллинеарны.
, значит, данные векторы коллинеарны.
б) Два вектора плоскости образуют базис, если они не коллинеарны (линейно независимы). Вычислим определитель, составленный из координат векторов ![]() :
:![]() , значит, векторы линейно независимы и образуют базис.
, значит, векторы линейно независимы и образуют базис.
Ответ: а) , б) образуют.
Выглядит значительно компактнее и симпатичнее, чем решение с пропорциями.
С помощью рассмотренного материала можно устанавливать не только коллинеарность векторов, но и доказывать параллельность отрезков, прямых. Рассмотрим пару задач с конкретными геометрическими фигурами.
Пример 3
Даны вершины четырёхугольника . Доказать, что четырёхугольник является параллелограммом.
Доказательство
: Чертежа в задаче строить не нужно, поскольку решение будет чисто аналитическим. Вспоминаем определение параллелограмма:
Параллелограммом
называется четырёхугольник, у которого противоположные стороны попарно параллельны.
Таким образом, необходимо доказать:
1) параллельность противоположных сторон и ;
2) параллельность противоположных сторон и .
Доказываем:
1) Найдём векторы:
![]()
2) Найдём векторы:
Получился один и тот же вектор («по школьному» – равные векторы). Коллинеарность совсем очевидна, но решение таки лучше оформить с толком, с расстановкой. Вычислим определитель, составленный из координат векторов :![]() , значит, данные векторы коллинеарны, и .
, значит, данные векторы коллинеарны, и .
Вывод : Противоположные стороны четырёхугольника попарно параллельны, значит, он является параллелограммом по определению. Что и требовалось доказать .
Больше фигур хороших и разных:
Пример 4
Даны вершины четырёхугольника . Доказать, что четырёхугольник является трапецией.
Для более строгой формулировки доказательства лучше, конечно, раздобыть определение трапеции, но достаточно и просто вспомнить, как она выглядит.
Это задание для самостоятельного решения. Полное решение в конце урока.
А теперь пора потихонечку перебираться из плоскости в пространство:
Как определить коллинеарность векторов пространства?
Правило очень похоже. Для того чтобы два вектора пространства были коллинеарны, необходимо и достаточно , чтобы их соответствующие координаты были пропорциональны .
Пример 5
Выяснить, будут ли коллинеарны следующие векторы пространства:
а) ;
б)
в) ![]()
Решение:
а) Проверим, существует ли коэффициент пропорциональности для соответствующих координат векторов:
Система не имеет решения, значит, векторы не коллинеарны.
«Упрощёнка» оформляется проверкой пропорции . В данном случае:
– соответствующие координаты не пропорциональны, значит, векторы не коллинеарны.
Ответ: векторы не коллинеарны.
б-в) Это пункты для самостоятельного решения. Попробуйте его оформить двумя способами.
Существует метод проверки пространственных векторов на коллинеарность и через определитель третьего порядка, данный способ освещен в статье Векторное произведение векторов .
Аналогично плоскому случаю, рассмотренный инструментарий может применяться в целях исследования параллельности пространственных отрезков и прямых.
Добро пожаловать во второй раздел:
Линейная зависимость и независимость векторов трехмерного пространства.
Пространственный базис и аффинная система координат
Многие закономерности, которые мы рассмотрели на плоскости, будут справедливыми и для пространства. Я постарался минимизировать конспект по теории, поскольку львиная доля информации уже разжёвана. Тем не менее, рекомендую внимательно прочитать вводную часть, так как появятся новые термины и понятия.
Теперь вместо плоскости компьютерного стола исследуем трёхмерное пространство. Сначала создадим его базис. Кто-то сейчас находится в помещении, кто-то на улице, но в любом случае нам никуда не деться от трёх измерений: ширины, длины и высоты. Поэтому для построения базиса потребуется три пространственных вектора. Одного-двух векторов мало, четвёртый – лишний.
И снова разминаемся на пальцах. Пожалуйста, поднимите руку вверх и растопырьте в разные стороны большой, указательный и средний палец . Это будут векторы , они смотрят в разные стороны, имеют разную длину и имеют разные углы между собой. Поздравляю, базис трёхмерного пространства готов! Кстати, не нужно демонстрировать такое преподавателям, как ни крути пальцами, а от определений никуда не деться =)
Далее зададимся важным вопросом, любые ли три вектора образуют базис трехмерного пространства ? Пожалуйста, плотно прижмите три пальца к столешнице компьютерного стола. Что произошло? Три вектора расположились в одной плоскости, и, грубо говоря, у нас пропало одно из измерений – высота. Такие векторы являются компланарными и, совершенно очевидно, что базиса трёхмерного пространства не создают.
Следует отметить, что компланарные векторы не обязаны лежать в одной плоскости, они могут находиться в параллельных плоскостях (только не делайте этого с пальцами, так отрывался только Сальвадор Дали =)).
Определение : векторы называются компланарными , если существует плоскость, которой они параллельны. Здесь логично добавить, что если такой плоскости не существует, то и векторы будут не компланарны.
Три компланарных вектора всегда линейно зависимы
, то есть линейно выражаются друг через друга. Для простоты снова представим, что они лежат в одной плоскости. Во-первых, векторы мало того, что компланарны, могут быть вдобавок ещё и коллинеарны, тогда любой вектор можно выразить через любой вектор. Во втором случае, если, например, векторы не коллинеарны, то третий вектор выражается через них единственным образом: ![]() (а почему – легко догадаться по материалам предыдущего раздела).
(а почему – легко догадаться по материалам предыдущего раздела).
Справедливо и обратное утверждение: три некомпланарных вектора всегда линейно независимы , то есть никоим образом не выражаются друг через друга. И, очевидно, только такие векторы могут образовать базис трёхмерного пространства.
Определение : Базисом трёхмерного пространства называется тройка линейно независимых (некомпланарных) векторов , взятых в определённом порядке , при этом любой вектор пространства единственным образом раскладывается по данному базису , где – координаты вектора в данном базисе
Напоминаю, также можно сказать, что вектор представлен в виде линейной комбинации базисных векторов.
Понятие системы координат вводится точно так же, как и для плоского случая, достаточно одной точки и любых трёх линейно независимых векторов:
началом координат
, и некомпланарные
векторы , взятые в определённом порядке
, задают аффинную систему координат трёхмерного пространства
:
Конечно, координатная сетка «косая» и малоудобная, но, тем не менее, построенная система координат позволяет нам однозначно определить координаты любого вектора и координаты любой точки пространства. Аналогично плоскости, в аффинной системе координат пространства не будут работать некоторые формулы, о которых я уже упоминал.
Наиболее привычным и удобным частным случаем аффинной системы координат, как все догадываются, является прямоугольная система координат пространства :
Точка пространства, которая называется началом координат
, и ортонормированный
базис задают декартову прямоугольную систему координат пространства
. Знакомая картинка:
Перед тем, как перейти к практическим заданиям, вновь систематизируем информацию:
Для трёх векторов пространства эквивалентны следующие утверждения
:
1) векторы линейно независимы;
2) векторы образуют базис;
3) векторы не компланарны;
4) векторы нельзя линейно выразить друг через друга;
5) определитель, составленный из координат данных векторов, отличен от нуля.
Противоположные высказывания, думаю, понятны.
Линейная зависимость / независимость векторов пространства традиционно проверяется с помощью определителя (пункт 5). Оставшиеся практические задания будут носить ярко выраженный алгебраический характер. Пора повесить на гвоздь геометрическую клюшку и орудовать бейсбольной битой линейной алгебры:
Три вектора пространства
компланарны тогда и только тогда, когда определитель, составленный из координат данных векторов, равен нулю
: .
.
Обращаю внимание на небольшой технический нюанс: координаты векторов можно записывать не только в столбцы, но и в строки (значение определителя от этого не изменится – см. свойства определителей). Но гораздо лучше в столбцы, поскольку это выгоднее для решения некоторых практических задач.
Тем читателям, которые немножко позабыли методы расчета определителей, а может и вообще слабо в них ориентируются, рекомендую один из моих самых старых уроков: Как вычислить определитель?
Пример 6
Проверить, образуют ли базис трёхмерного пространства следующие векторы:
Решение : Фактически всё решение сводится к вычислению определителя.
а) Вычислим определитель, составленный из координат векторов (определитель раскрыт по первой строке):
, значит, векторы линейно независимы (не компланарны) и образуют базис трёхмерного пространства.
Ответ : данные векторы образуют базис
б) Это пункт для самостоятельного решения. Полное решение и ответ в конце урока.
Встречаются и творческие задачи:
Пример 7
При каком значении параметра векторы будут компланарны?
Решение
: Векторы компланарны тогда и только тогда, когда определитель, составленный из координат данных векторов равен нулю:
По существу, требуется решить уравнение с определителем. Налетаем на нули как коршуны на тушканчиков – определитель выгоднее всего раскрыть по второй строке и сразу же избавиться от минусов:
Проводим дальнейшие упрощения и сводим дело к простейшему линейному уравнению:![]()
Ответ : при
Здесь легко выполнить проверку, для этого нужно подставить полученное значение в исходный определитель и убедиться, что  , раскрыв его заново.
, раскрыв его заново.
В заключение рассмотрим ещё одну типовую задачу, которая носит больше алгебраический характер и традиционно включается в курс линейной алгебры. Она настолько распространена, что заслуживает отдельного топика:
Доказать, что 3 вектора образуют базис трёхмерного пространства
и найти координаты 4-го вектора в данном базисе
Пример 8
Даны векторы . Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе.
Решение : Сначала разбираемся с условием. По условию даны четыре вектора, и, как видите, у них уже есть координаты в некотором базисе. Какой это базис – нас не интересует. А интересует следующая вещь: три вектора вполне могут образовывать новый базис . И первый этап полностью совпадает с решением Примера 6, необходимо проверить, действительно ли векторы линейно независимы:
Вычислим определитель, составленный из координат векторов :
, значит, векторы линейно независимы и образуют базис трехмерного пространства.
! Важно : координаты векторов обязательно записываем в столбцы определителя, а не в строки. Иначе будет путаница в дальнейшем алгоритме решения.